 Image 1 of 3
Image 1 of 3
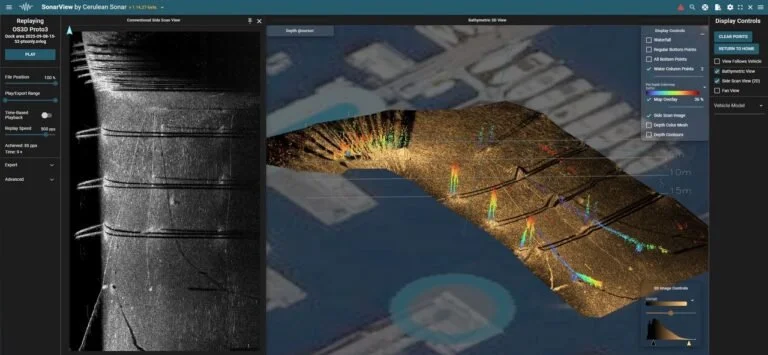 Image 2 of 3
Image 2 of 3
 Image 3 of 3
Image 3 of 3
The Omniscan 3D by Cerulean Sonar is a compact, high‑resolution imaging sonar that bridges the gap between traditional side‑scan sonar and multibeam echo sounders. Operating at 450 kHz with a 16‑channel receive array, it generates dense 3D point clouds in real time, delivering true spatial understanding underwater—even in zero visibility.
Designed for inspection, mapping, and navigation, the Omniscan 3D 450 SS enables operators and autonomous platforms to clearly understand complex subsea environments. Built on Cerulean’s proven Omniscan technology, it combines advanced imaging performance with intuitive operation at an accessible price point.
Unlike traditional mechanically scanned sonars, the Omniscan 3D uses vehicle motion and real‑time processing via Cerulean’s SonarView software. As the vehicle moves, SonarView continuously builds a detailed 3D representation of the environment, allowing operators to instantly focus on structures, terrain, and objects of interest.
The Omniscan 3D doesn’t just show echoes—it reveals structure. Using motion‑based reconstruction and a multi‑element receive array, it visualizes underwater scenes in true 3D, improving interpretation, measurement, and situational awareness.
Key features
Real‑time 3D point‑cloud imaging
Detailed volumetric imaging in low or zero visibility
Improved object detection and spatial awareness
Ideal for inspection, mapping, and navigation workflows
The modular architecture separates transmit, receive, and processing components, making the Omniscan 3D 450 SS easy to integrate into a wide range of ROV and AUV platforms. An Ethernet‑based interface and seamless integration with SonarView support real‑time visualization, recording, and post‑mission analysis.
Available with native support for BlueOS‑based vehicles, or for advanced integrators deploying the system on a compatible Linux host.
Structural inspection and infrastructure assessment
Subsea mapping and terrain modelling
Object detection and identification
Navigation and spatial awareness
Survey and 3D reconstruction
The Omniscan 3D by Cerulean Sonar is a compact, high‑resolution imaging sonar that bridges the gap between traditional side‑scan sonar and multibeam echo sounders. Operating at 450 kHz with a 16‑channel receive array, it generates dense 3D point clouds in real time, delivering true spatial understanding underwater—even in zero visibility.
Designed for inspection, mapping, and navigation, the Omniscan 3D 450 SS enables operators and autonomous platforms to clearly understand complex subsea environments. Built on Cerulean’s proven Omniscan technology, it combines advanced imaging performance with intuitive operation at an accessible price point.
Unlike traditional mechanically scanned sonars, the Omniscan 3D uses vehicle motion and real‑time processing via Cerulean’s SonarView software. As the vehicle moves, SonarView continuously builds a detailed 3D representation of the environment, allowing operators to instantly focus on structures, terrain, and objects of interest.
The Omniscan 3D doesn’t just show echoes—it reveals structure. Using motion‑based reconstruction and a multi‑element receive array, it visualizes underwater scenes in true 3D, improving interpretation, measurement, and situational awareness.
Key features
Real‑time 3D point‑cloud imaging
Detailed volumetric imaging in low or zero visibility
Improved object detection and spatial awareness
Ideal for inspection, mapping, and navigation workflows
The modular architecture separates transmit, receive, and processing components, making the Omniscan 3D 450 SS easy to integrate into a wide range of ROV and AUV platforms. An Ethernet‑based interface and seamless integration with SonarView support real‑time visualization, recording, and post‑mission analysis.
Available with native support for BlueOS‑based vehicles, or for advanced integrators deploying the system on a compatible Linux host.
Structural inspection and infrastructure assessment
Subsea mapping and terrain modelling
Object detection and identification
Navigation and spatial awareness
Survey and 3D reconstruction