BlueROV2
The World's Most Popular
Open-Source ROV
A professional-grade underwater ROV engineered for real-world inspection, research, and exploration. Six T200 thrusters, 1080p low-light camera, BlueOS software, and an open accessory ecosystem — from €4,500.


Inspect · Explore · Monitor · Recover
The benchmark open-source ROV
The BlueROV2 is the most widely deployed professional-grade underwater ROV in the world — trusted by research institutions, commercial inspection companies and government agencies on every continent. It began as a Kickstarter project and became the platform an entire industry now builds on.
Six T200 thrusters in a vectored arrangement deliver true 6-DOF, near-omnidirectional control. A 1080p low-light camera on a ±90° tilt, dual dimmable Lumen lights and a Bar30 depth sensor make up the core sensing suite — all driven by BlueOS, an open browser-based software stack running on an onboard Raspberry Pi 4. Control it from any laptop or tablet.
The Heavy Configuration Retrofit Kit adds two more thrusters for greater payload stability and vertical force. Add Cerulean Sonar imaging and positioning, the Newton Subsea Gripper, or third-party sensors through the standard WetLink Penetrator system — no custom engineering required.
- 6 × T200 thrusters standard — 8× with Heavy Configuration
- 1080p 30fps low-light camera, 110° FOV, 0.01 lux, ±90° tilt
- 2× (or 4×) Lumen dimmable lights — 1,500 lm each
- BlueOS + ArduSub: Stabilize, Depth Hold, Position Hold modes
- Cockpit GCS: widget-based UI, video recording, joystick support
- 14.8V 18Ah Li-ion battery — 2h normal / ~4h light use
- 25–300m tether options; neutral buoyancy (fresh water)
- Acrylic enclosures (100m) or aluminium (300m) configurable
Built to remove the limits of subsea work
Commercial-grade underwater work used to mean six-figure ROVs, dive teams or chartered vessels. The BlueROV2 was built to take those limits off the table.
💸 Cost barrier
Traditional inspection-class ROVs run well into six figures. The BlueROV2 delivers professional capability from a fraction of that — and you only buy the modules you need.
⚠️ Risk to divers
Currents, confined spaces, contaminated water and depth all put divers at risk. The BlueROV2 keeps people topside while the robot does the work.
🔒 Vendor lock-in
Closed systems trap you on one vendor's roadmap. BlueOS and ArduSub are fully open-source — inspect, extend and integrate without permission.
🧩 Rigid hardware
Most ROVs ship as a fixed package. The open frame, WetLink penetrators and PWM/Ethernet payload bus let you add sonar, grippers and sensors yourself.
Engineered for repeated salt-water deployment
Every component is designed, tested and rated for professional use in the ocean — not adapted from consumer hardware.

Vectored thrust in six degrees of freedom
The BlueROV2 runs on the Blue Robotics T200 — the world's most popular ROV thruster. Six are arranged in a vectored configuration so the vehicle pitches, rolls, yaws and translates in any direction, holding a stable attitude for clean inspection footage even in moving water.
- Flooded brushless T200 design — 300 m depth rated, salt-water proven
- Heavy Configuration adds 2 thrusters for payload stability and vertical force
- Basic ESC per thruster, driven by the Navigator Flight Controller

See clearly where there's almost no light
A 1080p 30fps low-light camera resolves detail down to 0.01 lux — near-total darkness at depth — across a 110° field of view, on a ±90° servo tilt so you can look up at a hull or down at the seabed without re-trimming the vehicle. Two dimmable 1,500-lumen Lumen lights come standard, expandable to four for 6,000 lumens total.

An open frame you can actually build on
The modular HDPE frame is drilled for payloads and leaves the watertight enclosures fully accessible. Choose acrylic tubes for 100 m work or anodised aluminium for 300 m, and route any sensor through the standard WetLink Penetrator system. A Raspberry Pi 4 and Navigator Flight Controller sit inside, with a Bar30 depth sensor, IMU, magnetometers and leak detection onboard.
Build Your BlueROV2 Package
Select your options below. All prices are in EUR — we will confirm exact pricing including delivery anywhere in the world.
Your Configuration
Indicative EUR pricing · Click any selection to remove it
We ship to Europe and worldwide. Your quote confirms exact pricing, delivery timeline, and any applicable import duties.
Extend Your BlueROV2
The BlueROV2's open architecture is purpose-built for integration. Cerulean Sonar — which we also distribute — makes the most compatible accessories for the BlueROV2 platform.
Omniscan 450 FS — Imaging Sonar
Forward-looking sonar for ROV navigation in turbid water. Mount on the BlueROV2 frame using purpose-designed brackets. 120m range, 120° horizontal FOV, real-time SonarView display via BlueOS.
View on Cerulean Sonar page →ROV Locator — Subsea Positioning
Know exactly where your BlueROV2 is underwater. The ROV Locator series provides real-time position on a map — from the affordable ROV Locator A1 to the full Omnitrack USBL. Native BlueOS integration.
View on Cerulean Sonar page →Tracker 650 DVL — Station Keeping
Doppler Velocity Log for precision station holding and dead-reckoning navigation. Mount to the BlueROV2 underside for hover stability in currents — ideal for inspection and survey work.
View on Cerulean Sonar page →Grippers, Sensors & More

Newton Subsea Gripper
A single-function open/close gripper rated to 300m. Mounts to the BlueROV2 frame. Controlled via a PWM output from the Navigator Flight Controller.

Newton Sediment Sampler
Collect sediment or water samples remotely. Spring-loaded mechanism with 60 ml capacity, 300m rated. Triggerable via the BlueROV2 control system.

Bar30 Depth / Pressure Sensor
High-resolution pressure and temperature sensor — included in the BlueROV2 standard build. 300m rated, 2mm depth resolution via I²C.

Ping360 Scanning Sonar
Blue Robotics' own 360° mechanical scanning sonar. 50m range, 750 kHz, 300m rated. Native BlueOS support with full 360° sweep display — for navigation and obstacle avoidance.
Browse Blue Robotics by category
Everything that goes on, in or around the BlueROV2 — explore the full range and add what you need to a quote.
Thrusters & Motors
T200 & T500 thrusters, ESCs and Lumen lights — the propulsion behind the ROV.
Sonars & Acoustics
Ping360 scanning, Omniscan imaging and DVL — see in turbid, zero-visibility water.
Sensors & Cameras
Bar30 depth, temperature, leak detection and upgrade cameras for the ROV.
Enclosures & Buoyancy
WTE enclosures, WetLink penetrators, foam and ballast for custom payloads.
All Accessories & Parts
The complete catalogue — 100+ upgrades, spares and cables for the BlueROV2.
An open software stack, not a locked black box
BlueOS runs the vehicle, ArduSub flies it and Cockpit (or QGroundControl) puts it in your hands — every layer open-source, inspectable and extensible.

BlueOS — the vehicle's operating system
BlueOS runs on the onboard Raspberry Pi 4 and serves a browser-based control panel to any connected laptop or tablet. Manage autopilot firmware and parameters, stream and record video, monitor system health and install community extensions — no software to install on your machine.
- Browser UI — works from any laptop, tablet or phone on the tether network
- Over-the-air firmware and BlueOS updates with one click
- Extension marketplace for sonar, DVL, mapping and custom tooling
- Live system monitoring, logging and network configuration

A modern ground control station
Cockpit is the modern, widget-based GCS for daily operations — a customisable layout with the live camera feed, a heading compass, depth, voltage and telemetry on a single screen. Pre-calibrated Xbox, DualShock 4 and DualSense profiles mean you can plug in a controller and fly, and record video with a telemetry subtitle track for defensible inspection records. QGroundControl remains available for mission planning and deep parameter tuning.
ArduSub Flight Modes
Three primary modes cover every scenario — from direct manual override to depth-stabilised station keeping.
Manual Mode
Direct, unassisted thruster control. Joystick inputs map directly to thruster outputs with no autopilot correction. Full pilot authority — used when maximum responsiveness is needed.
Stabilize Mode
The autopilot holds roll and pitch level when the joystick is released. The pilot controls heading, depth, and forward motion. Smooth, stable footage without fighting water movement.
Depth Hold Mode
Locks depth using the Bar30 pressure sensor. The pilot moves the ROV horizontally while ArduSub automatically compensates for vertical forces. Ideal for horizontal transect inspection.
Full Specifications
Performance & Physical ▾
| Max Depth | 100m (acrylic enclosures) / 300m (aluminium enclosures) |
| Max Speed | 1.5 m/s (approx. 3 knots) |
| Degrees of Freedom | 6 DOF — vectored thruster arrangement |
| Forward Thrust (45°) | 9 kgf (standard 6-thruster) |
| Vertical Thrust | 7 kgf (standard) |
| Payload Capacity | 1.2–1.4 kg (positive or negative) |
| Dimensions | 457 × 338 × 254 mm |
Thrusters & Power ▾
| Thrusters | 6× T200 (standard) or 8× T200 (Heavy Configuration) |
| T200 Max Thrust | 6.7 kgf at 20V / 5.25 kgf at 16V |
| T200 Depth Rating | 300m |
| Battery | 14.8V 18Ah Lithium-Ion (XT90 connector) |
| Run Time | ~2 hours normal / ~4 hours light use |
| ESC | Basic ESC (included, one per thruster) |
Camera & Lighting ▾
| Video Resolution | 1080p 30fps |
| Minimum Illumination | 0.01 lux (low-light sensor) |
| Field of View | 110° |
| Camera Tilt | ±90° servo-driven |
| Lights (standard) | 2× Lumen Subsea Light — 1,500 lm each, dimmable |
| Lights (Heavy / optional) | 4× Lumen Subsea Light — 6,000 lm total |
Electronics & Software ▾
| Onboard Computer | Raspberry Pi 4 (2 GB) |
| Flight Controller | Navigator Flight Controller (HAT for RPi4) |
| IMU | 6-DOF IMU + dual 3-DOF magnetometers + barometer |
| Depth Sensor | Bar30 (300m / 30 bar, 2mm resolution) |
| Leak Detection | Leak sensor (Navigator board) |
| Software | BlueOS + ArduSub |
| GCS | Cockpit (recommended) / QGroundControl |
| Tether Interface | Fathom-X Board (onboard) |
Tether Options ▾
| Standard Tether | 7.6mm diameter — 25m, 50m, 100m, 200m, 300m |
| Slim Tether | 4.0mm diameter — lower drag, same lengths |
| Buoyancy | Neutral (fresh water) / slightly positive (salt water) |

Where the BlueROV2 works
Deployed by professionals and researchers across every sector that needs reliable underwater observation, inspection or intervention.
Infrastructure Inspection
Hulls, piers, pipelines, dams, intakes and harbour structures — visual and sonar inspection without dewatering or divers.
Marine Science & Research
Repeatable transects, sample collection and photogrammetry for oceanography, ecology and habitat studies.
Aquaculture
Net, mooring and stock inspection inside and around sea-cages — fast checks without sending a diver into the pen.
Search & Recovery
Locate and recover objects, vehicles or evidence in low-visibility water with sonar, lights and a gripper payload.
Environmental & Conservation
Reef surveys, water-quality monitoring and species observation with minimal disturbance to sensitive habitats.
Underwater Filming
Stable, depth-held 1080p footage with telemetry overlay for documentary, broadcast and survey deliverables.
Education & R&D
An open, hackable platform for robotics teaching, computer-vision research and autonomy development.
Offshore & Energy
Platform, mooring and subsea-structure checks — aluminium enclosures take the BlueROV2 to 300 m.
BlueROV2 datasheet & specifications
Download the official Blue Robotics BlueROV2 datasheet, or build your exact configuration above and request a complete EUR quote.
Request BlueROV2 Pricing
Select your preferred configuration and tell us about your application — we will prepare a complete EUR quote, including any Cerulean Sonar or accessory additions.
Request a Quote — BlueROV2
Select your preferred package and describe your mission requirements below.
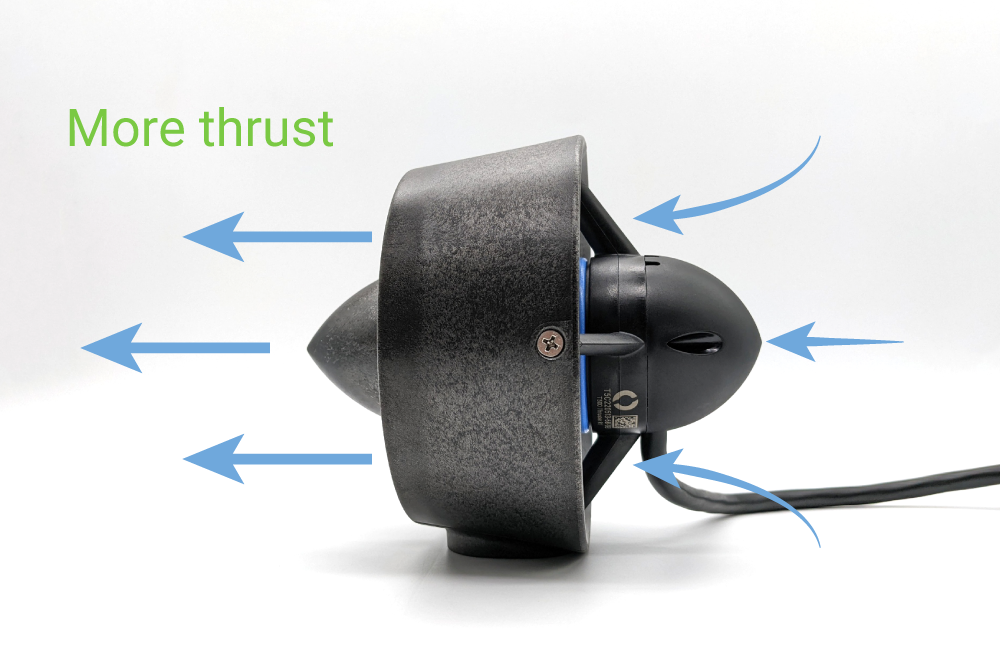


Vectored Thruster System & Heavy Kit Upgrade
The BlueROV2 is equipped with patented T200 thrusters, engineered for maximum efficiency and durability in harsh underwater environments. These thrusters deliver a high thrust-to-weight ratio and smooth, precise control, thanks to their vectored configuration. This setup allows the ROV to maneuver effortlessly in any direction, even in strong currents.
The standard BlueROV2 includes six thrusters, but for advanced missions, you can upgrade to eight with the Heavy Configuration Kit. This enhancement provides full six-degree-of-freedom movement and superior stability, making it ideal for carrying heavier payloads or operating in challenging conditions.
Performance Features:
High Thrust Output: Designed for demanding subsea operations
Corrosion-Resistant Materials: Built for long-term reliability
Adjustable Gain Settings: Fine-tune responsiveness for delicate tasks or high-power maneuvers